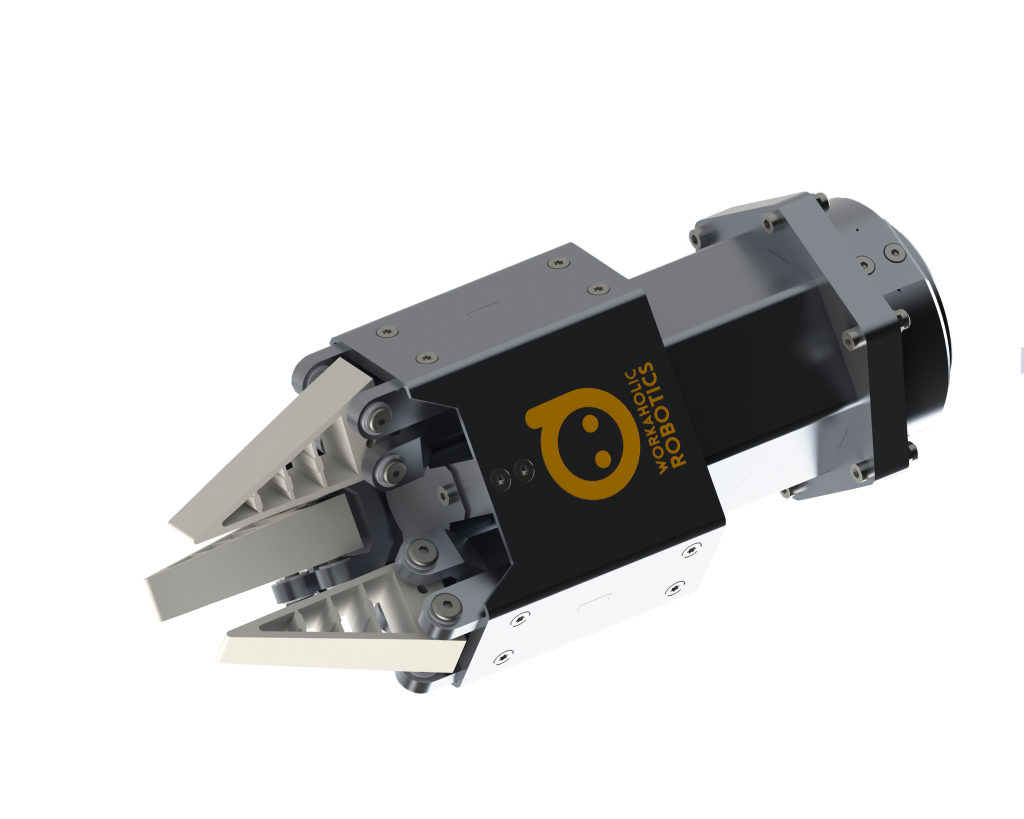
Elastic/Hard Finger Gripper (2-6 fingers)
The WR Gripper is a robust, multi-purpose end-effector engineered for demanding field operations.
Its curved, wide-surface fingers ensure gentle yet firm handling of fruits, vegetables, branches, and tools.
Ideal for harvesting, selective picking, and general manipulation tasks, it integrates seamlessly with WR robotic arms and platforms.
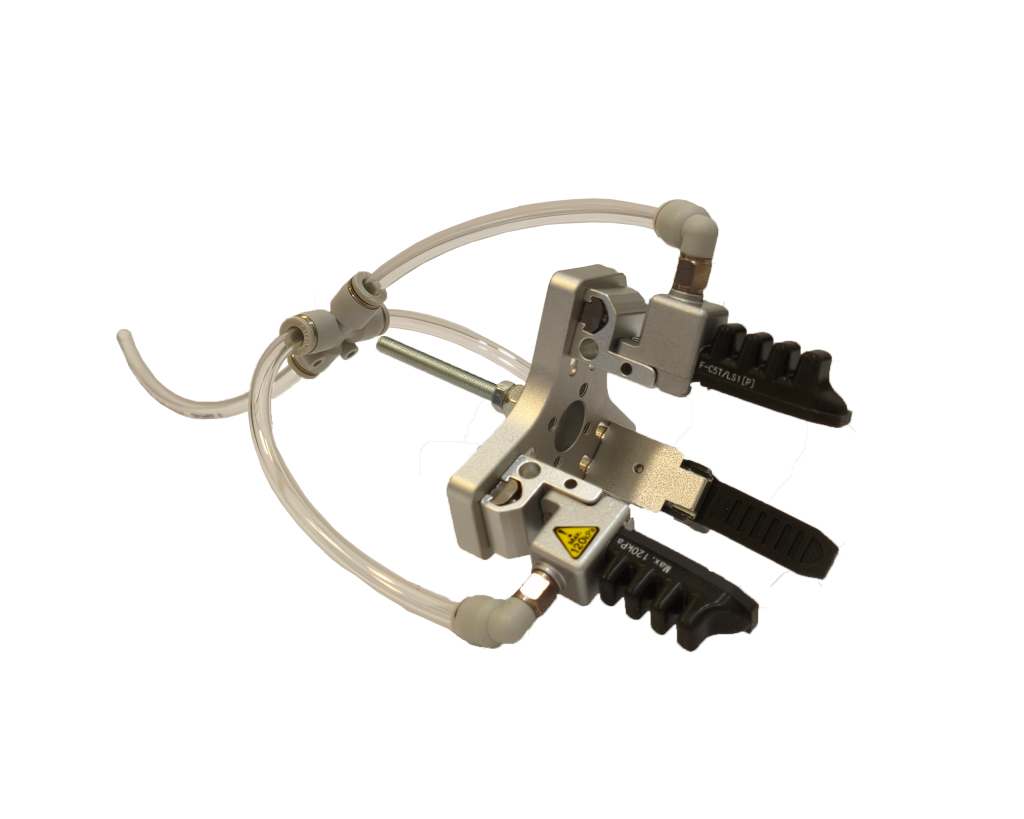
Softfinger Pneumatic Gripper (2-12 fingers)
A lightweight, soft-touch pneumatic gripper designed for delicate handling tasks.
Its flexible pneumatic fingers conform to the shape of fruits and vegetables, making it perfect for crops such as strawberries, tomatoes, berries, and other fragile produce.
The gripper delivers safe, non-damaging harvesting and sorting even for highly sensitive items.
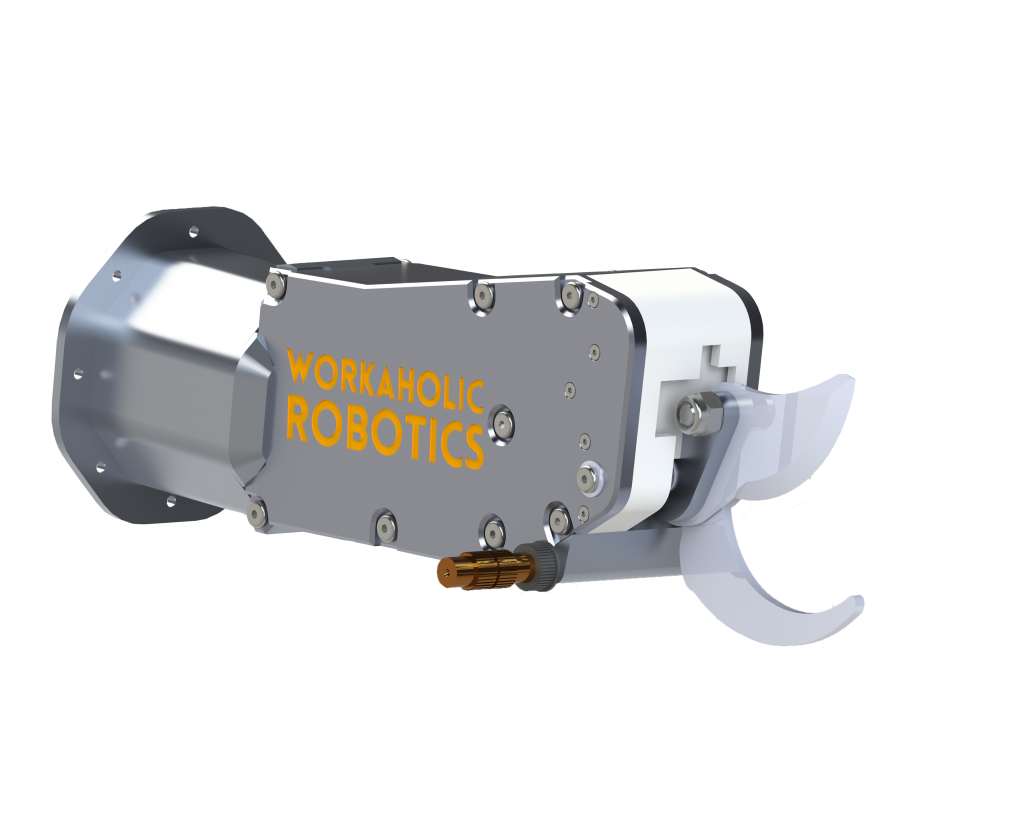
WR Pruner (S, M)
The WR Pruner is a high-precision robotic cutting tool designed for automated pruning in orchards, vineyards, and greenhouses.
Its powerful mechanism delivers clean, consistent cuts while minimizing plant damage.
Engineered for integration with robotic arms, it supports fast, accurate pruning of branches, stems, and shoots across a wide range of crops.

WR Gripper (S, M, L, XL)
The WR Gripper is a robust, multi-purpose end-effector engineered for demanding field operations.
Its curved, wide-surface fingers ensure gentle yet firm handling of fruits, vegetables, branches, and tools.
Ideal for harvesting, selective picking, and general manipulation tasks, it integrates seamlessly with WR robotic arms and platforms.
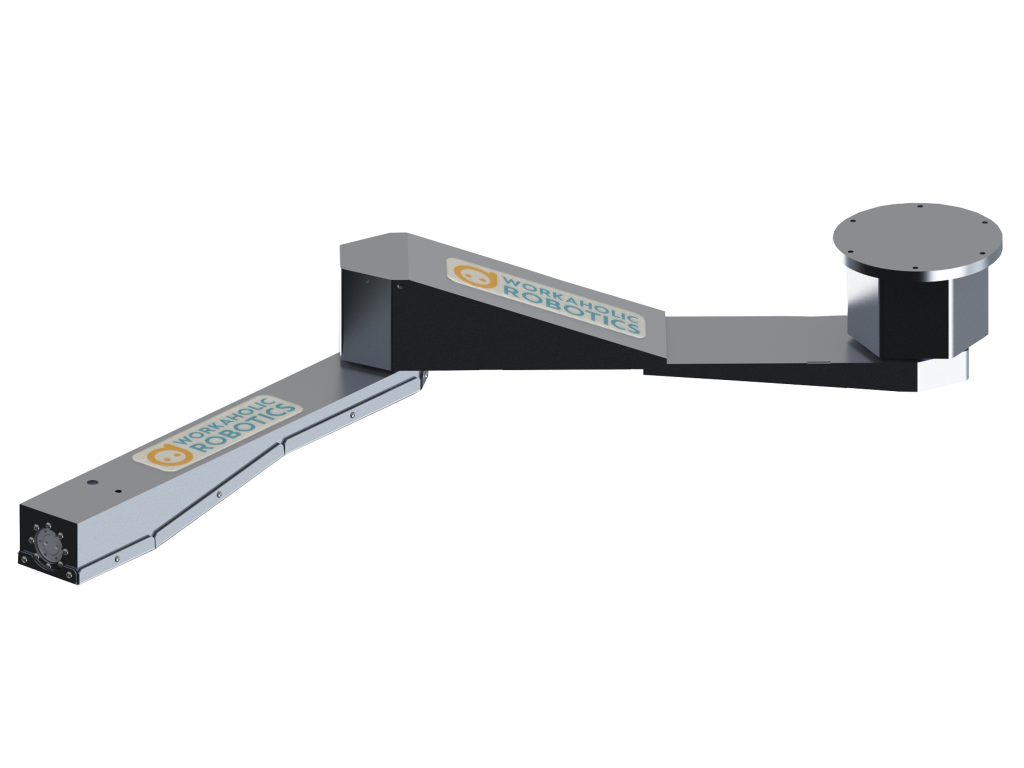
SCARA Fast Arm (S, M, L, XL)
A high-speed SCARA robotic arm designed for precise and repeatable pick-and-place operations. Its compact structure and fast motion make it ideal for automated handling, sorting, and light assembly tasks where speed and accuracy are critical.

Robotic 6 DOF Arm (S, M, L, XL)
A versatile articulated robotic arm equipped with an adaptive gripper for precise grasping and manipulation tasks. Designed for research, industrial, and field applications, it offers smooth multi-axis motion, reliable gripping performance, and easy integration into modular robotic platforms.